2.1 解析条件
軌道状態が本推定法に及ぼす影響を検討するために,数値軌道モデルを表1の条件下で3ケース設定した.
表1 解析条件
| 条件 |
道床横抵抗力 |
道床横剛性の空間変動 |
| Case1 |
線形 |
一様 |
| Case2 |
線形 |
変動(δ=0.5, λ=9m) |
| Case3 |
非線形 |
一様 |
以下の検討では,50kgNレールを想定し,初期通り変位の標準偏差は1cm,相関長は1mとした.最終道床横抵抗力は f0=1.2kN,a=1mmとした.この値は,分布バネの単位長さ当り道床横剛性 に換算すると,2MN/m2に相当する.また,検測装置による通り変位測定時のノイズは,標準偏差0.5mm[2]のガウスノイズとして設定した.
波数k≤1 (1/m)の範囲では式Ⅰ.(9)右辺のスペクトル比がノイズに鋭敏なため,推定には1≤k≤2(1/m)の波数範囲を用いるものとする.また,以下の解析において,軸力はN1=100kN,N2=200kNに設定した.
2.2 レールおよびまくらぎ拘束のモデル化の影響(Case1)
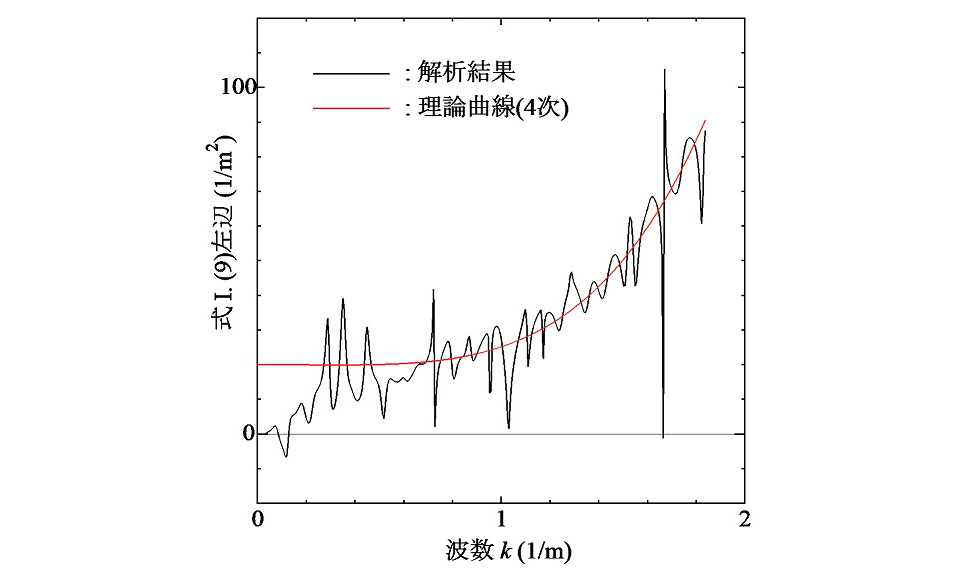
図3 スペクトル比(Case1)
離散まくらぎに作用する道床横抵抗力を,空間変動の無い一様な剛性f0/aを有する線形バネで与えた場合(Case1)のスペクトル比を図3に示す.解析結果にはノイズの影響による変動成分が含まれているものの,理論曲線との良好な対応関係が認められる.このことより,理論モデルにおけるレールのEulerばり近似や,連続まくらぎ支持近似の影響は無視し得ることが分かる.
2.3 道床横抵抗力の空間変動の影響(Case2)
Case2における結果を図4に示す.なお,図4は式(2)における変動振幅がδ=0.5,波長がλ=9mに対する結果を示したものであるが,δを0.1~0.5,λを3~15(m)の範囲でそれぞれ値を変えて計算を行ったところ,何れの条件においてもスペクトル比に有意な差異は認められず,道床横抵抗力の空間変動が影響しないことを確認した.
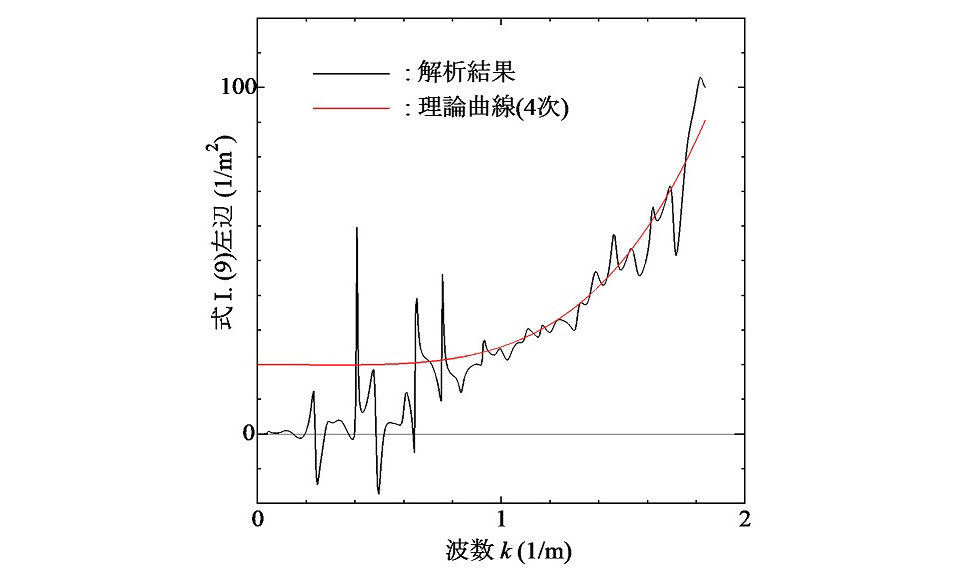
図4 スペクトル比(Case2)
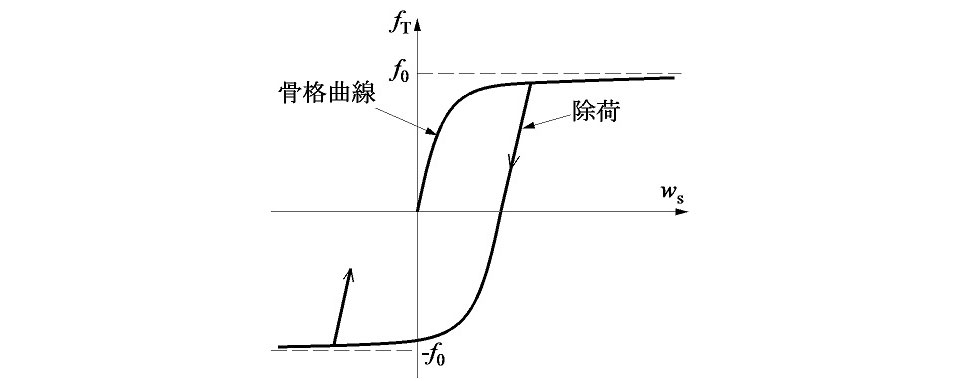
2.4 道床横抵抗力の非線形性の影響(Case3)
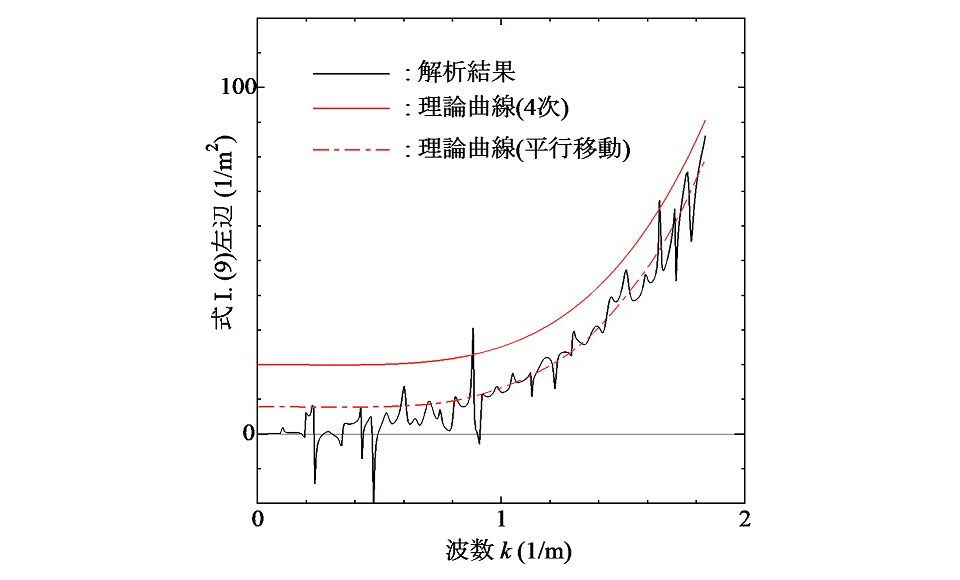
図5 スペクトル比(Case3)
道床横抵抗力に式(1)の非線形性を考慮した場合の結果を図5に示す.図より,数値モデルより得た擬似測定データのスペクトル比は,式I.(9)右辺で与えられる4次曲線(図中の赤線)に比べ全体に小さいことが分かる.ちなみに,道床横剛性は式I.(9)右辺の定数項(曲線の切片)に比例する.そのため,レール軸力に起因する弾性たわみの増加に伴い,道床横抵抗力の接線剛性は次第に低下し,それに連動して曲線の切片が低下したものと考えられる.
なお,図5には理論4次曲線を,カーブフィッティングにより下方へ平行移動させたものを赤色の一点鎖線で示した.当該曲線と擬似測定データのスペクトル比とには良好な一致が認められており,道床横抵抗力の非線形性はスペクトル比における2次と4次の項には影響しないことが分かる.このことより,道床横剛性は低めに評価されるものの,軸力推定は当該の非線形性の影響を受けないものと考えられる.
2.5 粒子フィルタによる推定
Case1~Case3の各軌道条件を対象に,粒子フィルタによる軸力推定を行った.その際に,以上の解析と同じく,2つの軸力をN1=100kN,N2=200kNと設定した.粒子フィルタにおける粒子を50000個生成し,各粒子が有する軸力を次式により与えた.

ここで,Nは設定軸力,Nmaxは軸力推定範囲の上限,rは[0,1]の区間における一様乱数である.一方,各粒子が有する道床横剛性は, =1.5~3.5(MN/m2)の範囲内で一様乱数により設定した.
=1.5~3.5(MN/m2)の範囲内で一様乱数により設定した.
以上の設定の下,粒子フィルタによる推定を5回実施して,その平均値をもって最終推定値とした.各ケースにおける推定結果をそれぞれ図6~図8に示す.なお,図は軸力推定範囲Nmax(横軸)と推定軸力N1, N2(縦軸)との関係を示したものである.また,図9にCase3における相対軸力ΔN=N2-N1の推定結果を示す.
図6~図8のいずれにおいても,軸力の探索範囲Nmaxの増加と共に推定軸力N1, N2も増加する傾向が認められる.また,設定した軸力推定範囲[0, Nmax]において,平均軸力(N+N2)/2が概ね中央値(Nmax/2)を示している.これは,粒子フィルタによる推定において,絶対軸力の推定精度(感度)が必ずしも十分に確保されておらず,事後確率分布が明確なピークを有していないことによるものと考えられる.一方,図9に示す様に,相対軸力ΔNに関しては,正解値より50kN程度一様に大き目ではあるものの,Nmaxによらず概ね一定値を与えており,比較的良好な推定結果が得られている.このことより,文献I.での検討結果と同様に,絶対軸力の推定にはさらなる工夫を要するが,相対軸力ΔN=N2-N1はある程度推定可能であることが確認できる.また,推定結果には軌道モデルの違いによる明確な影響は認められず,本推定法における軌道通り変位の定式化で採用した簡易な理論モデルによって,レール軸力と通り変位との関係を適切に表現し得ることがわかる.なお,他の軸力の組み合わせに対しても推定を行ったところ,同様の傾向が得られた.
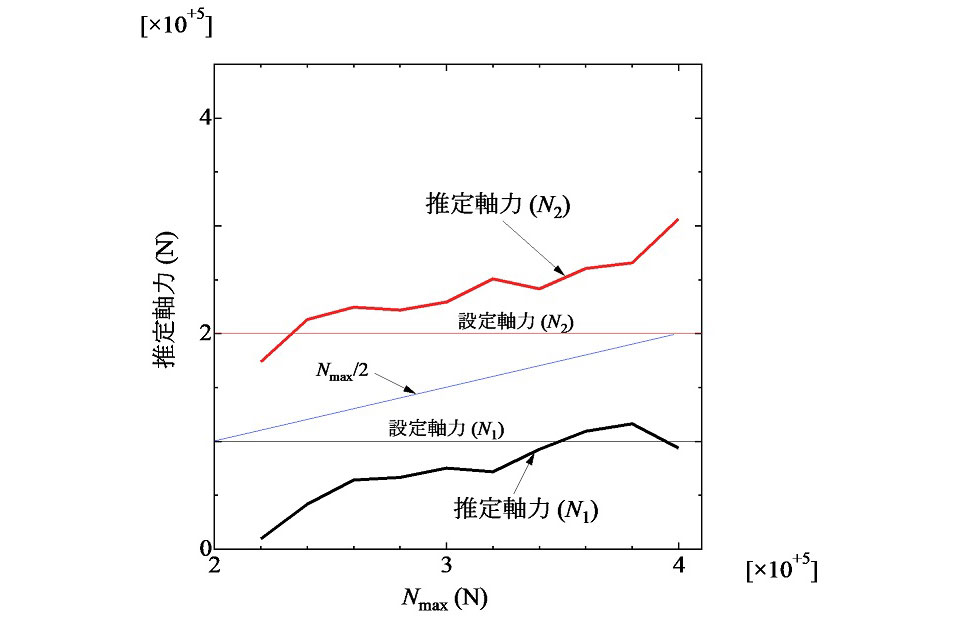
図6 軸力推定結果(Case1)
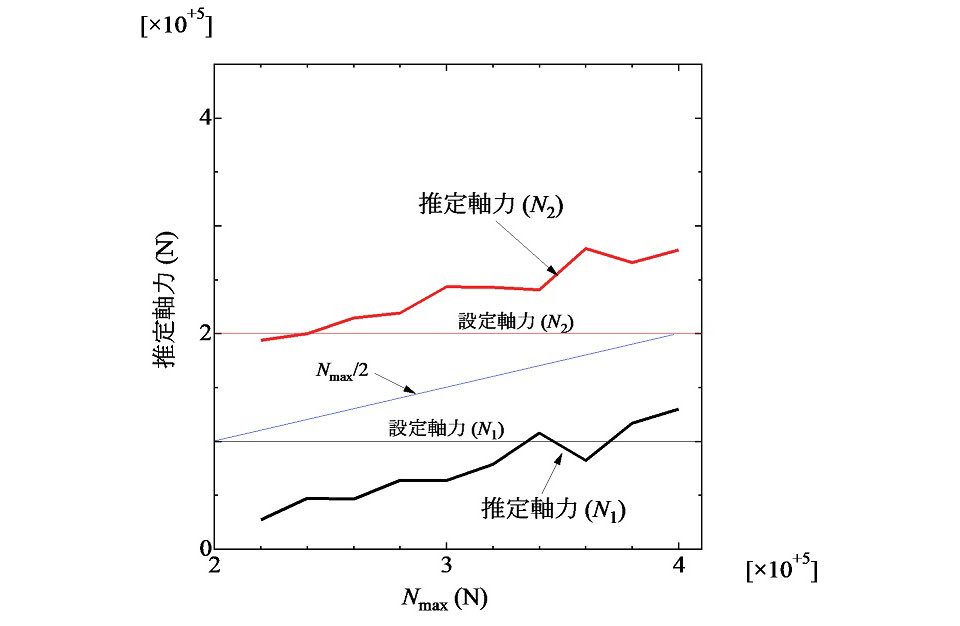
図7 軸力推定結果(Case2)
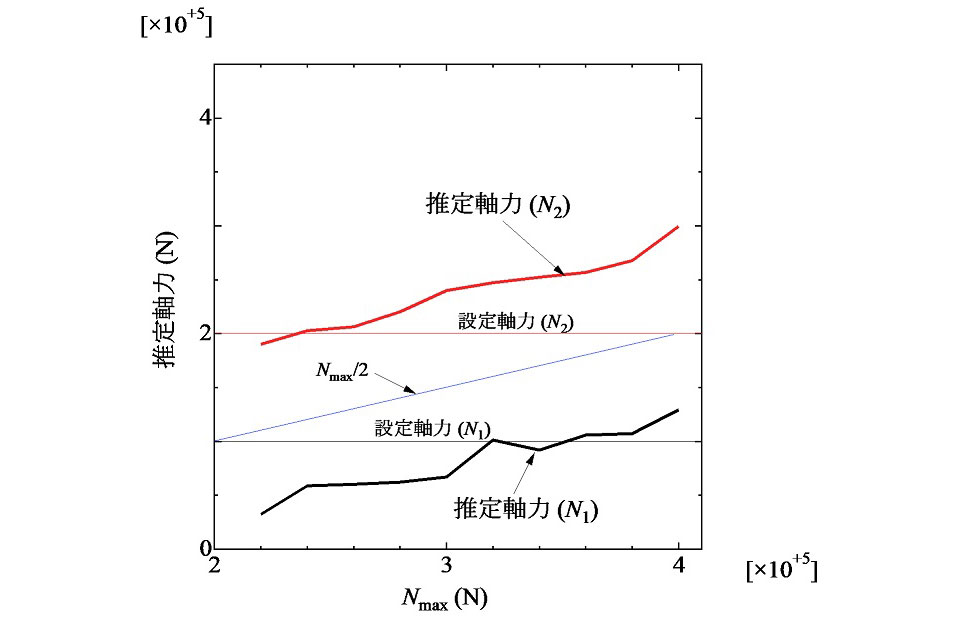
図8 軸力推定結果(Case3)
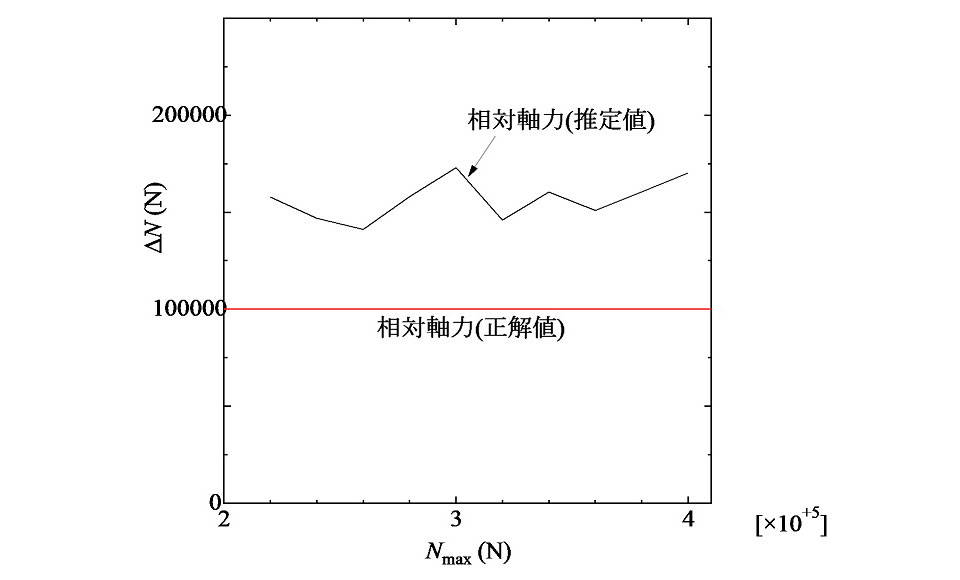
図9 相対軸力の推定結果(Case3)
Case3における道床横剛性の推定結果を図10に示す.なお,道床横剛性は分布バネの単位長さ当り剛性に換算した値となっている.図5に示した様に,道床横抵抗力の非線形性によりスペクトル比が全体に低下する傾向にあるため,その切片の値から求められる道床横剛性は低目に評価されるものと考えられた.図10に示した推定値は,総じて低目の値を示してはいるものの,正解値との差は最大でも15%程度であり比較的小さい.スペクトル比の切片は,式I.(9)右辺の定数項 で与えられるため,図5の様にその値が幾分小さ目であっても,図9における相対軸力ΔNの推定値が大き目となっているため,これらの影響が相殺され,道床横抵抗力における非線形性の有無によらず,結果的に剛性の推定値が概ね正解値を与えたものと考えられる.
で与えられるため,図5の様にその値が幾分小さ目であっても,図9における相対軸力ΔNの推定値が大き目となっているため,これらの影響が相殺され,道床横抵抗力における非線形性の有無によらず,結果的に剛性の推定値が概ね正解値を与えたものと考えられる.
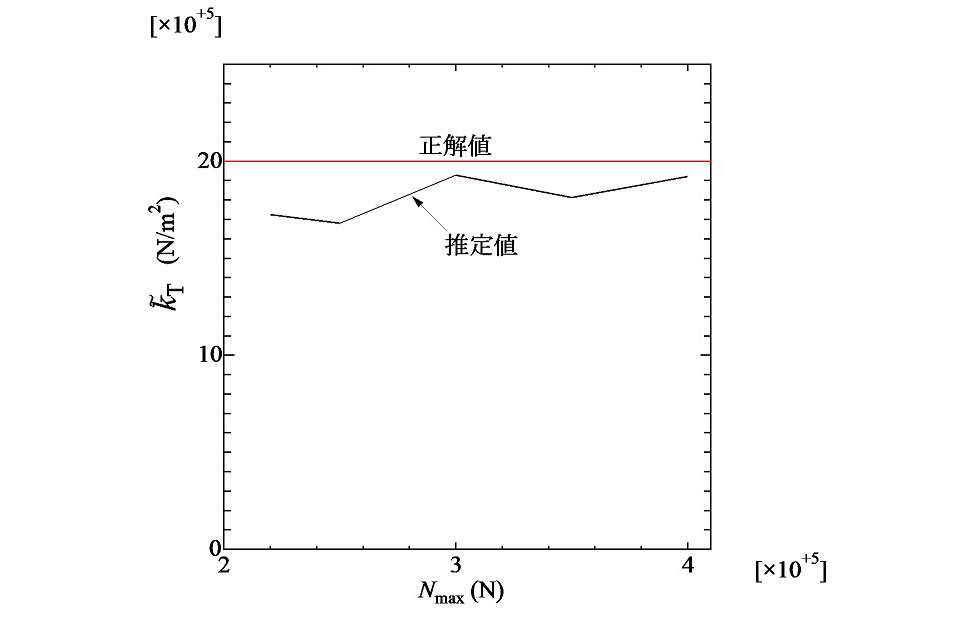
図10 道床横剛性の推定結果(Case3)



 は解析における最終道床横抵抗力の平均値,δ は変動振幅,λ は波長である.
は解析における最終道床横抵抗力の平均値,δ は変動振幅,λ は波長である.